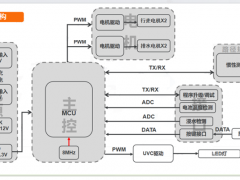
机械手臂是由履行系统、驱动系统、操控系统等几大部分组成,是靠伺服模块和运算基板来传输数据相位等参数,以控制伺服电机来完成各种复杂动作。
目前,随着自动化机械手臂工艺多样化,功能逐步提升,它的应用也越来越广泛,但是随之而来的 EMI问题也逐步显现出来, 产品中多个功模块都会产生极强的电磁辐射,比如高功率的供电系统,驱动板继电器通断切换产生的脉冲杂讯,还有伺服器本身单体EMI 不合格而产生的耦合效应,等诸多因素,都会造成产品最终EMI 检测不合格。
项目背景
最近接到一个机械手臂降低 EMI 成本的典型案例。
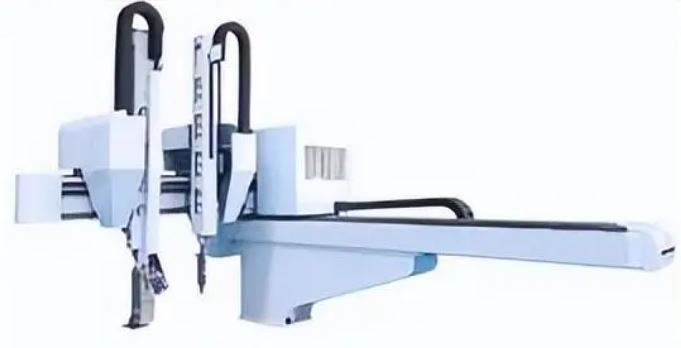
该产品为五轴机械手臂(如下图), 目标是要通过CQC自愿性认证,同时要满足欧美标准认证,由于产品在设计初期没有考虑到整机系统的EMI 防护,导致后期为通过法规标准的检测, 增加太多EMI 材料/器件,导致成本高,工艺复杂,无法批量生产。
针对上述问题,确定本次改善的目标是降低物料成本,通过法规测试,提升生产加工效率,保证批量生产作业性。
问题分析
针对之前复杂的EMI 对策工艺,决定取消所有原对策,做一个初始评估,机器初始数据如下:
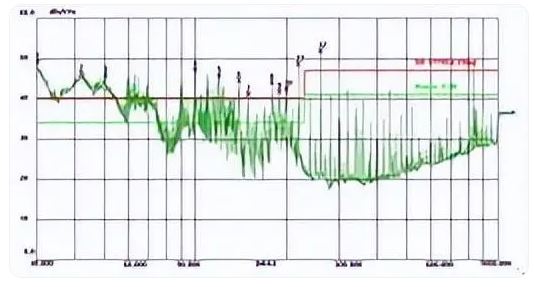
根据数据分析杂讯分布:
数据30MHz~200MHz 频率区间,Broad bandwidth 宽带频段,基本是电源系统的问题;
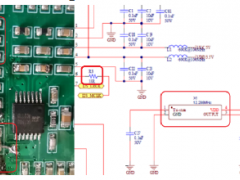
数据90MHz~700MHz 频率区间,有规律的倍频杂讯,判定是晶振或时钟信号的问题;
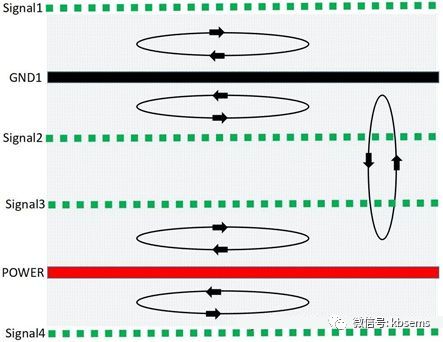
数据80MHz~150MHZ 频率区间,Narrow bandwidth 窄带频段,评估为线材耦合,或伺服电机驱动时导致的杂讯。